Драйвер шагового двигателя с микроконтроллером
Вавилова 0 шт. Новосибирской 0 шт. Двойной H-мост позволяет управлять двумя двигателями постоянного тока или одним шаговым Рабочее напряжение: 2,7 - 10,8 В Выходной ток: 1,2 A пиковый 2 A на двигатель Выводы могут быть соединены параллельно для увеличения тока до 2,4 A пиковый 4 A для управления одним двигателем Входное напряжение: 3 В - 5 В Блокировка питания при падении напряжения и защита от перегрева и перегрузки по току Защита от переполюсовки питания Ограничение по току можно обеспечить путем добавления резисторов Распиновка контактов Вывод: Уровень: Пояснение: VIN - 2,7 - 10,8 В соединение питания двигателя. VMM - Этот вывод дает доступ к питанию, после его прохождения через полевой транзистор, защищающий от обратного напряжения см. Он может быть использован для подачи защищенного от обратного напряжения питания на другие компоненты системы.











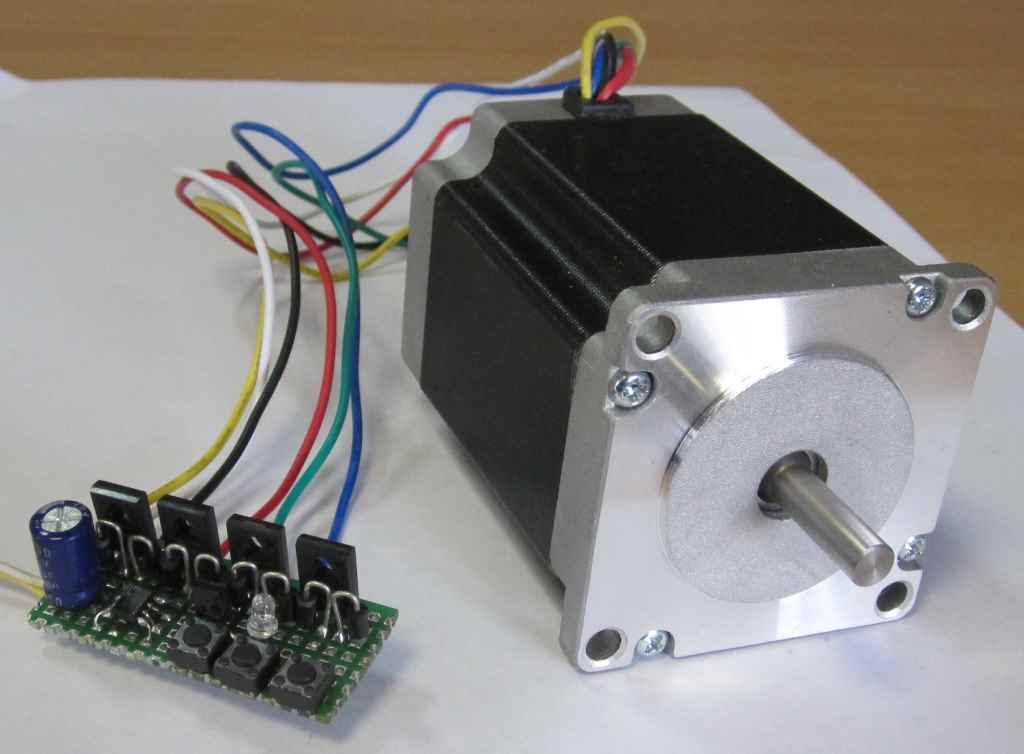
Разберемся какие моторы для каких целей предназначены. Сервопривод - разновидность мотора, угол поворота которого можно отслеживать с помощью контроллера. Данная особенность позволяет поворачивать вал сервопривода на нужный угол и отслеживать текущее положение вала. Шаговый двигател ь - разновидность мотора, который как и сервопривод может поворачиваться на заданный угол, однако не имеет обратной связи с контроллером и не позволяет отслеживать текущее положение вала.







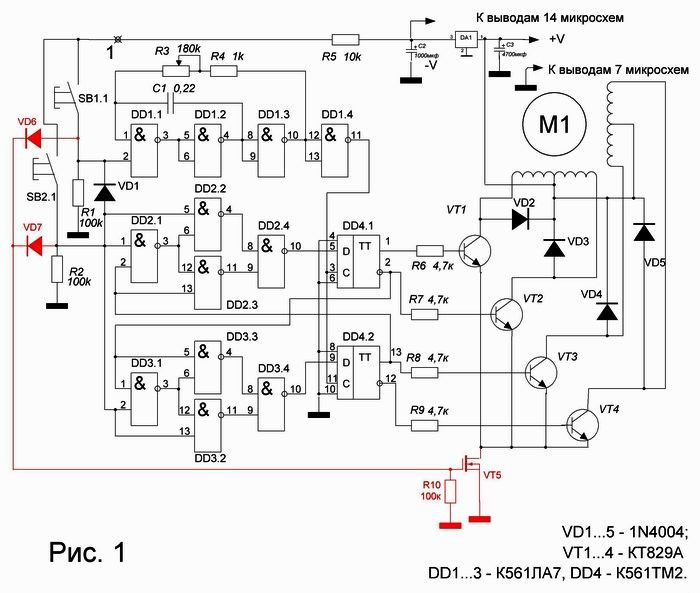
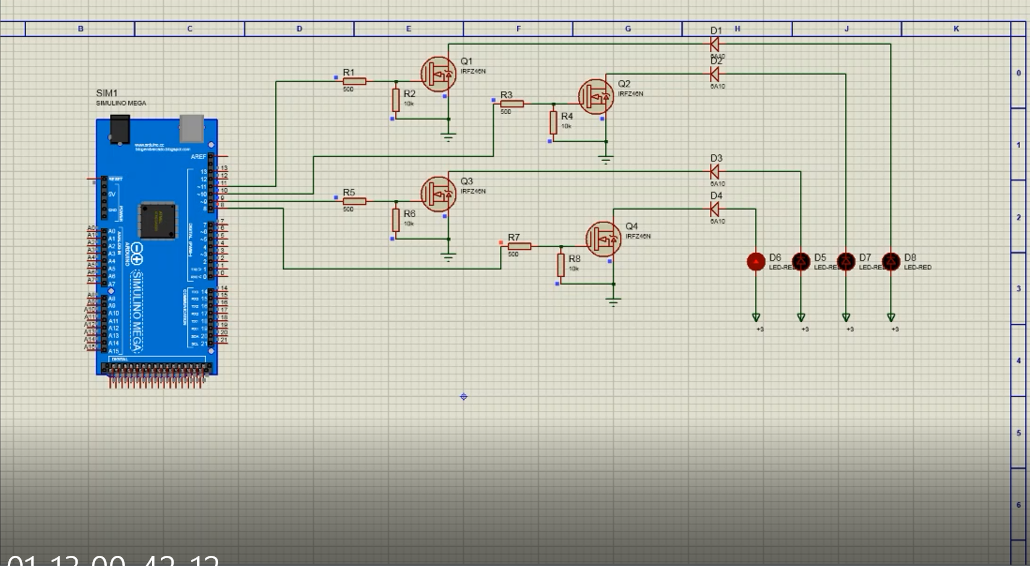
Драйвер шагового двигателя своими руками — хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.